



اگر به یک وب سایت یا فروشگاه رایگان با فضای نامحدود و امکانات فراوان نیاز دارید بی درنگ دکمه زیر را کلیک نمایید.
ایجاد وب سایت یادسته بندی سایت
محبوب ترین ها
پرفروش ترین ها
پر فروش ترین های فورکیا
 فارسی ساز Bioshock Remastered
فارسی ساز Bioshock Remastered فارسی ساز Dragons Dogma 2
فارسی ساز Dragons Dogma 2 فارسی ساز Bioshock Remastered 2
فارسی ساز Bioshock Remastered 2 دانلود فایل بسته آمادهچاپ و نصب تابلو اعلانات مسجدنما هفته چهارم ماه 1404
دانلود فایل بسته آمادهچاپ و نصب تابلو اعلانات مسجدنما هفته چهارم ماه 1404 دانلود فایل بسته آمادهچاپ و نصب تابلو اعلانات مسجدنما هفته سوم خرداد ماه 1404
دانلود فایل بسته آمادهچاپ و نصب تابلو اعلانات مسجدنما هفته سوم خرداد ماه 1404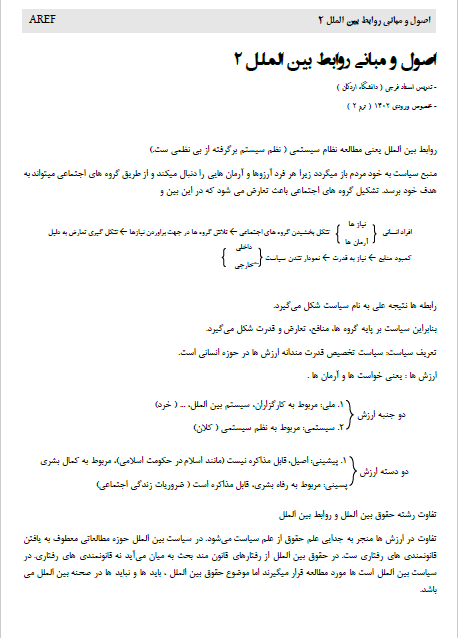 اصول و مبانی اصول روابط بین الملل 1
اصول و مبانی اصول روابط بین الملل 1 تحقیق کاربردی درباره نقش فضای مجازی در استحکام یا تضعیف روابط خانوادگی (20 صفحه ورد)
تحقیق کاربردی درباره نقش فضای مجازی در استحکام یا تضعیف روابط خانوادگی (20 صفحه ورد) پاورپوینت فصل هشتم تفسیر موضوعی قرآن کریم تکالیف انسان در برابر خدا
پاورپوینت فصل هشتم تفسیر موضوعی قرآن کریم تکالیف انسان در برابر خدا راهنمای جامع تعمیر کولر زانتیا
راهنمای جامع تعمیر کولر زانتیا دوره (آزمون) دستیاری پزشکی تخصصی 1404 با پاسخنامه (گروه A/گروه B/ گروه C و گروه D)
دوره (آزمون) دستیاری پزشکی تخصصی 1404 با پاسخنامه (گروه A/گروه B/ گروه C و گروه D) جزوه خلاصه و بسیار جامع فیزیوپاتولوژی قلب
جزوه خلاصه و بسیار جامع فیزیوپاتولوژی قلب جزوه فناوری اطلاعات سلامت (صدوقی)
جزوه فناوری اطلاعات سلامت (صدوقی) رمز گشایی ضمیر پنهان نوشته حمید تقدسی
رمز گشایی ضمیر پنهان نوشته حمید تقدسی درسنامه پرستاری کودکان وونگ-جلد اول کودک سالم و جلد دوم کودک بیمار
درسنامه پرستاری کودکان وونگ-جلد اول کودک سالم و جلد دوم کودک بیمار جزوه خلاصه و جامع ژنتیک
جزوه خلاصه و جامع ژنتیک خلاصه جامع بیوشیمی
خلاصه جامع بیوشیمی چشم پزشکی عمومی دکتر جوادی
چشم پزشکی عمومی دکتر جوادی مراقبت پرستاری ویژه
مراقبت پرستاری ویژه جزوهی کامل آمار استنباطی استاد فضلعلی پور
جزوهی کامل آمار استنباطی استاد فضلعلی پور فرهنگ واژه های روش تحقیق دکتر صحبایی
فرهنگ واژه های روش تحقیق دکتر صحبایی جزوه خلاصه دست نویس فارماکولوژی
جزوه خلاصه دست نویس فارماکولوژی جامع آزمون صلاحیت بالینی دم فیلی
جامع آزمون صلاحیت بالینی دم فیلی مجموعه تست اطفال 1 با پاسخ تشریحی- آمادگی آزمون پره انترنی و دستیاری -
مجموعه تست اطفال 1 با پاسخ تشریحی- آمادگی آزمون پره انترنی و دستیاری -پر بازدید ترین های فورکیا
 فروش فیلتر بورسی استریکلی فقط 75 هزار تومان
فروش فیلتر بورسی استریکلی فقط 75 هزار تومان کسب درآمد اینترنتی 300000 تومان در خانه در کمتر از 30 دقیقه
کسب درآمد اینترنتی 300000 تومان در خانه در کمتر از 30 دقیقه کسب و کار اینترنتی با درآمد میلیونی
کسب و کار اینترنتی با درآمد میلیونی كسب درآمد اينترنتي روزانه حداقل100هزار تومان تضميني
كسب درآمد اينترنتي روزانه حداقل100هزار تومان تضميني کسب درآمد روزانه حداقل یک میلیون تومان ! کاملا حلال و واقعـی !!
کسب درآمد روزانه حداقل یک میلیون تومان ! کاملا حلال و واقعـی !! کسب درآمد ابدی و بی نهایت 100% واقعی
کسب درآمد ابدی و بی نهایت 100% واقعی مجموعه ی آموزش تعمیر لامپ کم مصرف (از مبتدی تا پیشرفته)
مجموعه ی آموزش تعمیر لامپ کم مصرف (از مبتدی تا پیشرفته) دانلود مجموعه آموزشی پایپینگ ( Piping ) و نقشه خوانی + آموزش سه نرم افزار طراحی و تحلیل لوله کشی صنعتی
دانلود مجموعه آموزشی پایپینگ ( Piping ) و نقشه خوانی + آموزش سه نرم افزار طراحی و تحلیل لوله کشی صنعتی آموزش بازكردن انواع قفل ها بدون كليد(ويژه)
آموزش بازكردن انواع قفل ها بدون كليد(ويژه) آموزش برنامه نویسی آردوینو
آموزش برنامه نویسی آردوینو کسب و کار اینترنتی در منزل
کسب و کار اینترنتی در منزل بازگردانی پیامک های حذف شده- ریکاوری پیامک ۱۰۰٪ عملی
بازگردانی پیامک های حذف شده- ریکاوری پیامک ۱۰۰٪ عملی آموزش رایگان کسب درآمد از سایت الیمپ ترید ( olymp trade )
آموزش رایگان کسب درآمد از سایت الیمپ ترید ( olymp trade ) اموزش ویرایش امضا و پکیج برنامه اندروید و کسب درامد از مارکت های اندرویدی
اموزش ویرایش امضا و پکیج برنامه اندروید و کسب درامد از مارکت های اندرویدی دانلود نمونه فاکتور آماده با فرمت ورد - اکسل و عکس
دانلود نمونه فاکتور آماده با فرمت ورد - اکسل و عکس آموزش ساخت بازی بدون دانش برنامه نویسی و طراحی سه بعدی مبتدی تا پیشرفته با نرم افزار
آموزش ساخت بازی بدون دانش برنامه نویسی و طراحی سه بعدی مبتدی تا پیشرفته با نرم افزار آموزش كامل تعمير لامپ كم مصرف(اختصاصي)
آموزش كامل تعمير لامپ كم مصرف(اختصاصي) اموزش کسب درامد از اینترنت روزانه ۳میلیون تومان تضمینی و تست شده 1403
اموزش کسب درامد از اینترنت روزانه ۳میلیون تومان تضمینی و تست شده 1403 نسخه خطی اشعار و پیشگویی های شاه نعمت الله ولی
نسخه خطی اشعار و پیشگویی های شاه نعمت الله ولی درامدزایی در خواب! (تعجب نکنید! بخوانید)
درامدزایی در خواب! (تعجب نکنید! بخوانید) مدار داخلی واکی تاکی(اموزش ساخت)
مدار داخلی واکی تاکی(اموزش ساخت) کتاب افزایش ممبر کانال تلگرام
کتاب افزایش ممبر کانال تلگرام اندیکاتور ای کیو آپشن
اندیکاتور ای کیو آپشن دانلود100% رایگان نرم افزار تبلیغات در تلگرام + آموزش کامل و فیلم آموزشی
دانلود100% رایگان نرم افزار تبلیغات در تلگرام + آموزش کامل و فیلم آموزشی روش اصلی موفقیت در کنکور و آزمون ها(پزشکی، حقوق، مهندسی، نمونه و تیزهوشان) با پکیج کنکورپلاس
روش اصلی موفقیت در کنکور و آزمون ها(پزشکی، حقوق، مهندسی، نمونه و تیزهوشان) با پکیج کنکورپلاس مجموعه آزمایشات و گزارشات روانشناسی تجربی (شامل شرح 36 آزمایش) کاملترین مجموعه در اینترنت
مجموعه آزمایشات و گزارشات روانشناسی تجربی (شامل شرح 36 آزمایش) کاملترین مجموعه در اینترنت چگونه هر شخصی را عاشق خود کنیم ارزان
چگونه هر شخصی را عاشق خود کنیم ارزان کسب درآمد از اینترنت روزانه 100هزارتومان به بالا تضمینی و تست شده
کسب درآمد از اینترنت روزانه 100هزارتومان به بالا تضمینی و تست شدهبرچسب های مهم
پیوند ها
>p>فرمت فایل: ورد - Word ![]()
( -- قابل ویرایش )
تعداد صفحه : 36
چکیده این مقاله الگوریتمی جدید برای مسئله برنامه ریزی مسیرکلی به یک هدف ، برای ربات متحرک را با استفاده از الگوریتم ژنتیک ارائه می دهد .الگوریتم ژنتیک برای یافتن مسیر بهینه برای ربات متحرک جهت حرکت در محیط استاتیک که توسط نقشه ای با گره ها و لینک ها بیان شده است ،بکار گرفته شده است.موقعیت هدف و موانع برای یافتن یک مسیر بهینه در محیط دو بعدی داده شده است .هر نقطه اتصال در شبکه ژنی است که با استفاده از کد باینری ارائه شده است.تعداد ژن ها در یک کروموزوم تابعی از تعداد موانع در نقشه (نمودار)می باشد. بنابراین از یک کروموزوم با طول ثابت استفاده کردیم.مسیر ربات ایجاد شده ، در مفهوم کوتاهترین مسیر ،بهینه است .ربات دارای محل آغاز و محل هدف تحت فرضیه ای است که ربات از هر محل فقط یکبار می گذرد یا اصلا نمی گذرد.نتایج بدست آمده در شبیه سازی ؛قدرت الگوریتم پیشنهادی را تایید می نماید. مقدمه مسئله طراحی مسیر ربات متحرک را می توان بصورت ذیل بیان کرد: داده های مسئله (محل شروع،محل هدف، نقشه اي دو بعدی مسیرهاكه شامل موانع ساكن می باشد).هدف بدست آوردن یک مسير بدون تصادم بین دو نقطه خاص در ایفای معیار بهینه سازی با در نظر گرفتن محدودیت ها (به احتمال زیاد:کوتاهترین مسیر)می باشد. مسئله طراحی مسیر از نظر محاسباتی بسیار پر هزینه است. با اینکه حجم زیادی از تحقیقات برای حل بیشتر این مسائل انجام شده است،با این وجود،روش های معمول ،غیر قابل انعطاف می باشند. 1.اهداف مختلف بهينه سازي و تغييرات اهداف 2. عدم قطعیت ها در محیط ها 3. محدوديت هاي متفاوت براي منابع محاسباتي مرور و بازنگری روش های موجود برای حل مسئله طراحی مسیر ،در
قسمتی از محتوی متن پروژه میباشد که به صورت نمونه ، بعد از پرداخت آنلاین در فروشگاه فایل آنی فایل را دانلود نمایید .

« پرداخت آنلاین و دانلود در قسمت پایین »
![]()
مبلغ قابل پرداخت 12,096 تومان
مطالب تصادفی




